Capítulo 8 Cadenas de Transmisión en R
8.1 Identificación de cadenas de transmisión en R
Los pasos uno al tres ya fueron descritos en los apartados previos. En el paso Generar los archivos cas y geo (paso 5) de la Identificación de cluster de transmisión además de generar los archivos cas y geo, se genera un archivo llamado x_data, el cual contiene la información necesaría para calcular la cadenas de transmisión.
8.2 Knox test
A esta base se le aplica el knox test para identificar las cadenas de transmisión. La función denhotspots::knox() realiza la prueba de knox a la base de datos. La función tiene siete argumentos: x,crs,dt,ds,sym, sp_link & planar_coord.
| Argumento | Definición |
|---|---|
| x | Es la base de datos con las coordenadas y fecha de inicio de síntomas |
| crs | Es el sistema de referencia de coordenadas |
| dt | Es la ventana temporal |
| ds | Es la ventana espacial |
| sym | Es el numero de simulaciones de Monte Carlo |
| sp_link | Es un valor lógico para indicar la clase del objeto el space-time link. Si es TRUE, la clase es sp, de los contrario es sf |
| planar_coord | Es valor lógico para indicar si la base es projectada en un sistema planar (TRUE) o no (FALSE) |
# 1. Subir el archivo cas y geo generado con la función write_cas_geo
load("C:/Users/felip/Dropbox/manual_hotspots_veracruz/9.cas&geo_files/Xalapa de Enriquez302019.RData")
# 2. aplicar la prueba de knox
library(magrittr)
knox_res <- denhotspots::knox(x = x_data,
crs = "+proj=eqc",
ds = 400,
dt = 20,
sym = 1000,
sp_link = FALSE,
planar_coord = FALSE)8.2.1 Visualización de las cadenas de Transmisión
La visualización de las cadenas de transmisión se realiza a através de la función denhotspots::space_time_link_map. La función tiene cinco argumentos: x, locality, cve_edo, maptype &facetmap
| Argumento | Definición |
|---|---|
| x | Es el resultado de la prueba de knox |
| locality | Es la localidad blanco |
| cve_edo | Es la clave del estado |
| maptype | Es el tipo de mapa y tiene dos valores (staticmap = mapa estático, intereactive_map = mapa interactivo) |
| facetmap | Es un valor lógico para indicar si el mapa estático se presente en facetas (TRUE) o no (FALSE) |
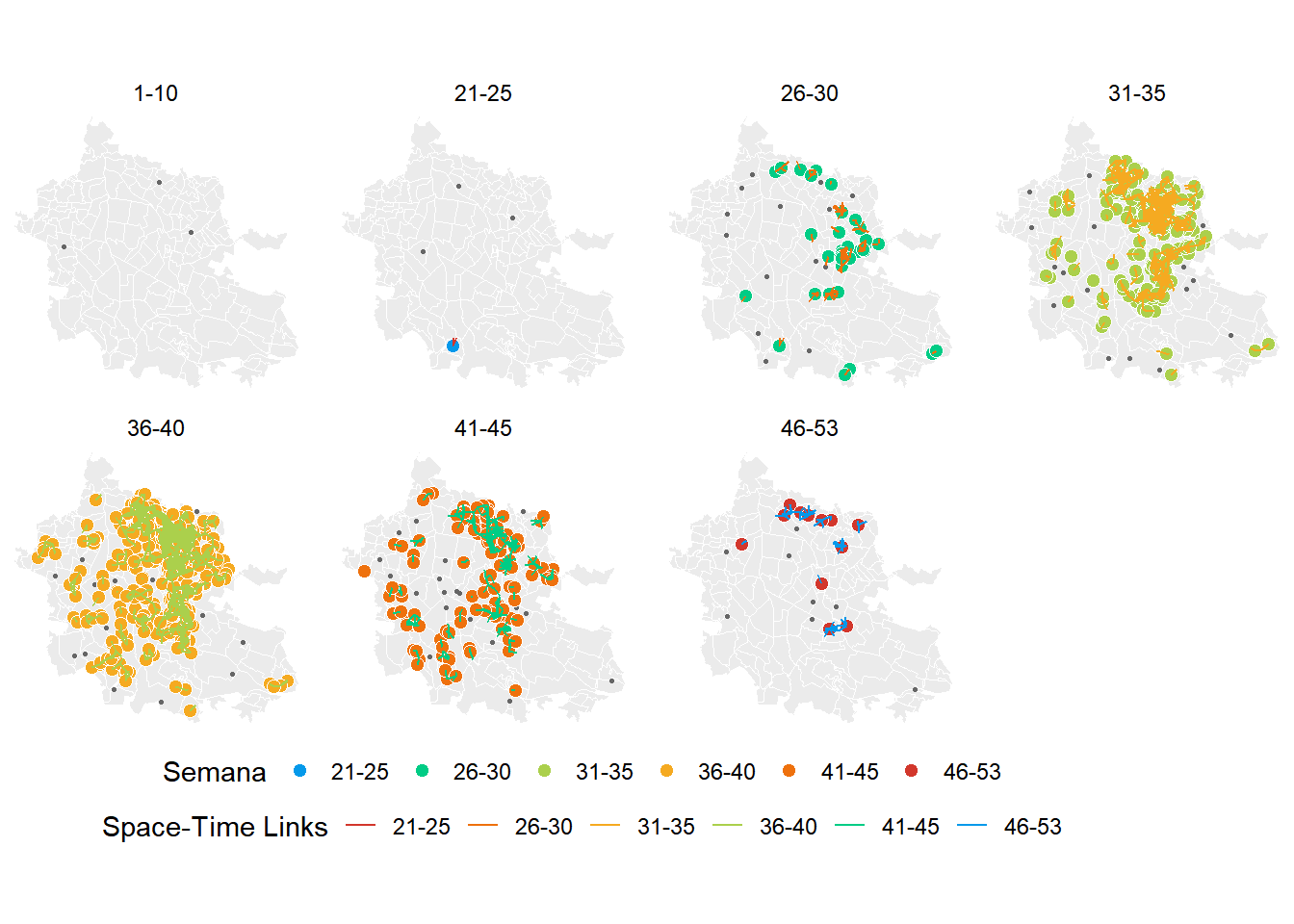
8.2.1.1 Mapa estático
plotly::ggplotly(
denhotspots::space_time_link_map(x = knox_res,
locality = "Xalapa de Enríquez",
cve_edo = "30",
maptype = "staticmap",
facetmap = FALSE))